

Как работает асинхронный электродвигатель
Электродвигатели, которые работают от сети переменного тока, называют асинхронными. Такое определение они получили из-за особенностей взаимодействия магнитных полей статора и ротора, в результате которого их скорость вращения различается.
Устройство этих электрических машин проще, чем работающих на постоянном токе, поскольку их статор не имеет электрического соединения с внешними устройствами, осуществляемого посредством токосъемных колец – коллектора, за что они получили и свое второе название «бесколлекторные электродвигатели».
Пальма первенства в их изобретении принадлежит русскому инженеру М. О. Доливо-Добровольскому, создавшему первый действующий трехфазный двигатель в 1890 году. Стоит отметить, что его конструкция не претерпела коренных изменений на протяжении более ста лет.
Содержимое
Почему он вращается
Принцип работы электродвигателя переменного тока основан на феномене возникновения вращающегося магнитного поля, в двух или трех соленоидах, определенным образом ориентированных в пространстве.
Направление вектора электромагнитного поля определяется правилом левой руки, согласно которому четыре пальца указывают направление движения тока, а пятый (большой) – движения самого проводника под действием сил электромагнитной индукции, входящих в открытую ладонь.
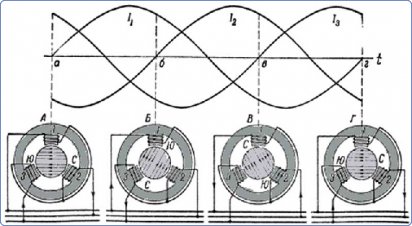
Если соленоид один, то при пропускании через него переменного тока стальной сердечник совершает колебательные движения. Чтобы он смог совершить оборот на 360°, нужны минимум две катушки, расположенные перпендикулярно друг другу, из-за чего суммарный вектор силы электромагнитной индукции будет описывать окружность.
Лучший, более стабильный, результат получается при использовании трех соленоидов, расположенных под углом друг к другу в 120°. Сдвиг фазы тока в катушках соленоида может быть достигнут не только позиционированием, но и включением в цепь одного из них активной нагрузки. Например, конденсатора.
Почему он асинхронный
Магнитное поле статора наводит в сердечнике ротора электрический ток, в результате чего он обзаводится собственным. Его полюса стремятся притянуться к тем, которые его породили, но это движение никогда не завершится по двум причинам:
- При совпадении полюсов пропадает разница электрических потенциалов между деталями машины, из-за чего ток в роторе прекращает течь, магнитное поле исчезает, а вал затормаживается. Эта своеобразная пульсация частоты вращения более выражена в двигателях, работающих от одной или двух фаз. Поэтому три катушки предпочтительнее.
- Статор больше ротора на величину магнитного зазора, поэтому создаваемое им магнитное поле имеет большую угловую скорость относительно центра вала.
Конструкция асинхронного электродвигателя
Оптимальным конструкторским решением расположения соленоидов является их размещение на внутренней поверхности цилиндра (трубы), внутри которого находится металлический вращающийся сердечник. Первый, поскольку он неподвижный, назвали статором электрической машины, а второй – ротором.
Постоянство расстояния между этими частями, называемого магнитным зазором, обеспечивается двумя крышками с подшипниками качения в центре. У асинхронных двигателей он не превышает трех миллиметров, поскольку при больших значениях сила электромагнитного взаимодействия между ротором и статором ослабевает настолько, что вал останавливается.
Конструкция ротора
Утверждение, что все асинхронные – это бесколлекторные электродвигатели, является допущением, в котором есть исключение. В действительности конструкция подвижной части электрической машины переменного тока бывает двух типов:
- Короткозамкнутый ротор.
- Ротор с фазными обмотками.
Короткозамкнутым называют ротор, устройство которого похоже на беличье колесо: он состоит из двух медных колец и нескольких толстых проводников, их соединяющих. Пространство между ними – сердечник – набирают из листов легированной стали, что уменьшает паразитные вихревые потоки. Во время пуска двигателя вращающееся поле статора провоцирует возникновение в нем электрического тока, а поскольку все проводники детали соединены друг с другом, возникает короткое замыкание.
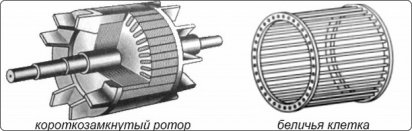
Поэтому пусковой ток асинхронных двигателей в два — три раза номинального рабочего. После того как ротор тронется с места, ток расходуется на создание магнитного поля. Из-за простоты устройства мирятся и с падением напряжения, и с моментальным набором скорости, что делает нагрузочную характеристику двигателя жесткой.
Фазные обмотки на роторе устраивают для ликвидации всплеска пускового тока, что необходимо для защиты сети от перегрузки. Их три, они соединяются звездой, а свободные концы выводят на коллектор, состоящий из трех медных колец, разделенных диэлектриком и посаженных на хвостовик вала двигателя. Перед включением ротор шунтируют большим сопротивлением (реостатом), который гасит ток.
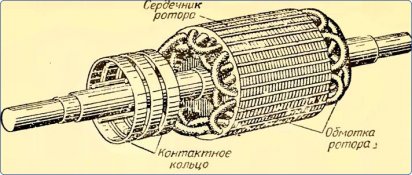
Передвигая ползунок реостата, допускают плавное возникновение тока в роторе и раскрутку вала двигателя. Асинхронность таких машин выше, поэтому у них ниже КПД. Зато появляется возможность плавной регулировки частоты вращения. Асинхронный двигатель с фазным ротором встречается очень редко из-за сложной конструкции, которая абсолютно идентична той, что имеет генератор переменного тока. Единственное его отличие – на коллекторные кольца подается постоянное напряжение, поэтому какую-то пару щеток можно замкнуть между собой.
Конструкция статора
 Она двухслойная. Наружную «рубашку», которая обеспечивает механическую прочность конструкции, ранее отливали из чугуна. Сейчас все чаще используют легкие сплавы. Для эффективного отвода тепла на ней делают ребра жесткости. Внутри находится слой, набранный из листов легированной стали, которые изолированы друг от друга диэлектрическим лаком. На его внутренней поверхности устроены пазы. В них укладываются обмотки – медный проводник из нескольких витков, которые изолированы друг от друга во избежание пробоя, приводящего к снижению силы магнитного поля и аварии машины. Зазор между статором и ротором очень мал, поэтому витки скрыты в толще металла, чтобы не мешать вращению.
Она двухслойная. Наружную «рубашку», которая обеспечивает механическую прочность конструкции, ранее отливали из чугуна. Сейчас все чаще используют легкие сплавы. Для эффективного отвода тепла на ней делают ребра жесткости. Внутри находится слой, набранный из листов легированной стали, которые изолированы друг от друга диэлектрическим лаком. На его внутренней поверхности устроены пазы. В них укладываются обмотки – медный проводник из нескольких витков, которые изолированы друг от друга во избежание пробоя, приводящего к снижению силы магнитного поля и аварии машины. Зазор между статором и ротором очень мал, поэтому витки скрыты в толще металла, чтобы не мешать вращению.
Однофазные двигатели
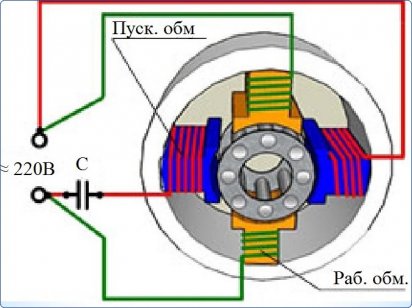 Однофазный асинхронный двигатель отличается лишь количеством статорных обмоток, которых две. Они всегда включены параллельно и расположены перпендикулярно друг другу. Для обеспечения начального фазного сдвига в цепь одной из них включена активная нагрузка. Обычно бумажный конденсатор большой емкости. После набора оборотов одна из обмоток отключается. Так делается в двигателях мощностью свыше пятидесяти ватт. У маломощных машин вторая обмотка выполняется короткозамкнутой. Фазу сдвигает индуцированный противоток.
Однофазный асинхронный двигатель отличается лишь количеством статорных обмоток, которых две. Они всегда включены параллельно и расположены перпендикулярно друг другу. Для обеспечения начального фазного сдвига в цепь одной из них включена активная нагрузка. Обычно бумажный конденсатор большой емкости. После набора оборотов одна из обмоток отключается. Так делается в двигателях мощностью свыше пятидесяти ватт. У маломощных машин вторая обмотка выполняется короткозамкнутой. Фазу сдвигает индуцированный противоток.
Управление скоростью вращения
Явным недостатком асинхронных двигателей является сложность управления ими. Для изменения скорости вращения используются два метода:
- Частотное преобразование питающего напряжения. Практически никогда не применяется, поскольку по законам электротехники любая индуктивность (обмотка, соленоид, трансформатор) спокойно переносит только повышение частоты. При ее понижении она начинает работать в режиме нагревателя.
- Варианты с числом, способом укладки и размещением в пазах обмоток статора. Метод основан на том, что три фазных обмотки – это один условный двухполюсной вращающийся магнит, совершающий полный оборот за период, равный частоте сети. То есть, при самой простой конструкции статорной обмотки частота вращения будет равна 3 тыс. оборотов в минуту.
Если на статоре разместить шесть обмоток, сгруппировать их по три и подключить последовательно, то получим не два, а четыре полюса. Из-за этого частота вращения снизится в два раза – до 1500 оборотов в минуту.
При устройстве девяти обмоток, подключенных по тому же принципу, скорость снизится еще в два раза, до 750 оборотов в минуту, ведь полюсов станет шесть. Дальнейшее снижение скорости не производится, поскольку связано с большими техническими трудностями.
Нередко технология производства требует, чтобы привод мог вращаться с двумя или тремя скоростями. Эта проблема решается двумя путями:
- Подключением дополнительных независимых обмоток. Вместе с изменением скорости меняется и крутящий момент электродвигателя, поскольку индуктивность всякий раз разная.
- Устройством дополнительных выводов из одной обмотки. Так называемый метод Даландера. Имеет преимущество в том, что крутящий момент сохраняется неизменным.
Двухскоростной асинхронный электродвигатель имеет статорную обмотку, каждая из катушек поделена которой на две дополнительными выводами. Для наглядности обозначим 2U, 2V и 2W. В режиме тихого хода (1500 оборотов) обмотки соединены треугольником, питающее напряжение подается на выводы 1U, 1V и 1W, а 2U, 2V и 2W остаются свободными. Если требуется набрать 3 тыс. оборотов, то производится коммутация:
- питание подается на 2U, 2V и 2W;
- выводы 1U, 1V и 1W соединяются между собой.
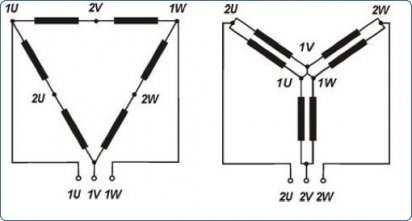
В результате схема подключения обмоток меняется с «треугольника», в каждой стороне которого две последовательных катушки, на «звезду», в каждом луче которой две параллельных катушки. Число полюсов сократилось вдвое, а суммарная индуктивность осталась той же.
Существуют и трехскоростные электродвигатели, обмотки которых имеют по три вывода, поскольку должно получиться девять обмоток.
Обычно для управления многоскоростными асинхронными двигателями устраивают силовую релейную схему. Это позволяет изменять скорость вращения за несколько секунд.
Значимость изобретения в конце XIX века трехфазного асинхронного двигателя вполне можно сравнить с появлением компьютера и даже с полетом в космос. До сих пор человечество не сумело создать ничего более эффективного, ведь КПД этого устройства близко к ста процентам.
